Uma máquina elétrica que converte energia elétrica em energia mecânica é chamada de motor elétrico. Em primeiro lugar, o motor elétrico é um dispositivo eletrostático simples criado pelo monge escocês Andrew Gordon em 1740. Mas em 1821, Michael Faraday demonstrou a conversão de energia elétrica em energia mecânica.
Os motores elétricos são classificados principalmente em duas categorias: motores CA e Motores DC . Novamente, cada categoria é subdividida em vários tipos. Muitas cargas como misturadora, trituradora, ventiladores, etc., eletrodomésticos de uso mais frequente nos quais podemos encontrar diversos tipos de motores e estes podem funcionar a diferentes velocidades com fornecimento de controle de velocidade dos motores. Neste artigo, vamos discutir sobre um dos principais tipos de motores DC, a saber Motor de passo e seu controle usando o microcontrolador.
Motor de passo
Um síncrono e motor DC sem escova que converte pulsos elétricos em movimentos mecânicos e, portanto, gira passo a passo com um certo ângulo entre cada passo para completar uma rotação completa é chamado de motor de passo. O ângulo entre as etapas de rotação do motor de passo é denominado como o ângulo de passo do motor.

Motor de passo
Os motores de passo são classificados em dois tipos de acordo com seu enrolamento: Motores de passo unipolares e motores de passo bipolares. O motor de passo unipolar é freqüentemente usado em muitas aplicações devido à sua facilidade de operação em comparação com o motor de passo bipolar. Mas existem diferentes tipos de motores de passo, como motor de passo de ímã permanente, motor de passo de relutância variável e motor de passo híbrido.
Controle de motor de passo
O motor de passo pode ser controlado com várias técnicas, mas aqui estamos discutindo o controle do motor de passo usando um Microcontrolador Atmega . O 89C51 é um microcontrolador da Família de microcontroladores 8051 .

Diagrama de blocos do controle do motor de passo
O diagrama de blocos de um controle de motor de passo usando um microcontrolador 8051 é mostrado na figura com fonte de energia , microcontrolador, motor de passo e blocos de chave de controle.
2 métodos para projetar o circuito de controle do motor de passo
O controlador de motor de passo é projetado usando microcontroladores 8051 e circuito de comutação para controlar a velocidade do motor de passo. O circuito da chave de controle pode ser projetado usando interruptores de transistor ou usando o controlador de motor de passo IC, como ULN2003, no lugar dos transistores.
1. Circuito de controle usando IC do controlador de motor de passo
O motor de passo unipolar pode ser girado energizando as bobinas do estator em sequência. A sequência desses sinais de tensão aplicados nas bobinas do motor ou condutores é suficiente para acionar o motor e, portanto, nenhum circuito acionador é necessário para controlar a direção da corrente nas bobinas do estator.

Controle de motor de passo usando IC
O motor de passo de duas fases consiste em quatro fios terminais conectados às bobinas e dois fios comuns conectados aos dois terminais para formar duas fases. Os pontos comuns e pontos finais das duas fases são conectados ao terra ou Vcc e os pinos do microcontrolador, respectivamente. Para girar o motor, os pontos finais das duas fases devem ser energizados. Primeiramente, uma tensão é aplicada ao primeiro ponto final da fase 1 e outra tensão é aplicada ao primeiro ponto final da fase 2, e assim por diante.
O motor de passo pode ser operado em diferentes modos, como modo de passo de movimentação de onda, modo de passo de drive completo e modo de passo de metade de drive.
Modo de passo do Wave Drive
Repetindo a sequência acima, o motor pode ser girado no modo de acionamento de ondas no sentido horário ou anti-horário com base na seleção dos pontos finais. A tabela abaixo mostra a sequência de fase do sinal para o modo de passo de transmissão de onda.


Modo de passo do Wave Drive
Modo Full Drive Stepping
Energizar os dois pontos finais de diferentes fases simultaneamente atinge um modo passo a passo completo. A tabela mostra a sequência de fase do sinal para o modo full-drive-stepping.


Modo Full Drive Stepping
Modo Half Drive Stepping
A combinação das etapas dos modos wave e full-drive-stepping atinge um modo de meia-drive-stepping. Assim, neste modo, o ângulo de pisada é dividido pela metade. A tabela mostra a sequência de fase do sinal de um modo de passo de meia direção.


Modo Half Drive Stepping
Em geral, o ângulo de passo depende da resolução do motor de passo. O tamanho dos passos e a direção da rotação são diretamente proporcionais ao número e ordem da seqüência de entrada. A velocidade de rotação do eixo depende da frequência da sequência de entrada. O torque e o número de ímãs magnetizados por vez são proporcionais.
O motor de passo requer corrente de 60mA, mas a corrente nominal máxima do microcontrolador Atmega AT89C51 é 50mA. Portanto, um controlador de motor de passo IC foi usado para fazer a interface do motor de passo com o microcontrolador para transferir os sinais.
2. Circuito de chave de controle usando transistores
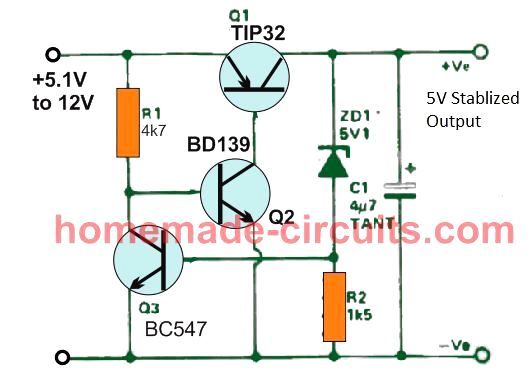
O fornecimento de energia para o circuito pode ser fornecido diminuindo a tensão de 230 V para 7,5 V usando um transformador redutor e, em seguida, retificando por uma ponte retificadora com diodos . Esta saída retificada é alimentada a um capacitor de filtro e então passada pelo regulador de tensão. A saída regulada de 5 V é obtida do regulador de tensão. O pino 9 de reset é conectado entre o capacitor e o resistor.

Circuito de controle de motor de passo usando transistor
Em geral, o motor de passo consiste em quatro bobinas, conforme mostrado na figura. Portanto, para acionar o motor, são necessários quatro circuitos de acionamento do motor. Em vez de usar o controlador de motor de passo IC para acionar o motor, quatro transistores são conectados como os circuitos de acionamento em 21, 22, 23 e 24 pinos do microcontrolador, respectivamente.
Se os transistores começarem a conduzir, um campo magnético será criado ao redor da bobina, causando a rotação do motor. A velocidade do motor de passo é diretamente proporcional à frequência de pulso de entrada. Um oscilador de cristal é conectado aos pinos 18 e 19 para fornecer freqüência de clock do microcontrolador de cerca de 11,019 MHz.
O tempo de execução de qualquer instrução pode ser calculado usando a fórmula abaixo
Tempo = ((C * 12)) / f
Onde C = número do ciclo
E F = frequência do cristal
Um dos circuitos baseados em aplicação que usa um motor de passo para painel solar rotativo é descrito abaixo.
Controle de motor de passo usando microcontrolador 8051 programado
Projeto Sun Tracking Solar Panel destina-se a gerar a quantidade máxima de energia ajustando automaticamente o painel solar. Neste projeto, um motor de passo controlado por um microcontrolador programado da família 8051 faz interface com o painel solar para manter a face dos painéis solares sempre perpendicular ao sol.

Controle de motor de passo usando microcontrolador por Edgefxkits.com
O microcontrolador programado gera pulsos elétricos escalonados em intervalos regulares para o motor de passo para girar o painel solar. O IC do driver é usado para acionar o motor de passo, pois o controlador é incapaz de fornecer os requisitos de energia do motor.
Deixe suas sugestões, comentários e dúvidas postando comentários na seção de comentários abaixo. Faremos o nosso melhor para ajudá-lo tecnicamente em relação a este artigo e desenvolvendo projetos elétricos e eletrônicos usando o motor de passo.