
Servo implica um controle de feedback de detecção de erro que é utilizado para corrigir o desempenho de um sistema. Também requer um controlador geralmente sofisticado, geralmente um módulo dedicado projetado especialmente para uso com servomotores. Servo motores são motores DC que permitem o controle preciso da posição angular. São motores DC cuja velocidade é reduzida lentamente pelas engrenagens. Os servo motores geralmente têm um corte de rotação de 90 ° a 180 °. Alguns servo motores também têm um corte de rotação de 360 ° ou mais. Mas os servo motores não giram constantemente. Sua rotação é limitada entre os ângulos fixos.
O servo motor é um conjunto de quatro coisas: um motor DC normal, uma unidade de redução de engrenagem, um dispositivo de detecção de posição e um circuito de controle. O motor DC está conectado a um mecanismo de engrenagem que fornece feedback para um sensor de posição que é principalmente um potenciômetro. A partir da caixa de engrenagens, a saída do motor é entregue via servo spline ao braço do servo. Para servo motores padrão, a engrenagem é normalmente feita de plástico, enquanto que, para servos de alta potência, a engrenagem é feita de metal.
Um servo motor consiste em três fios - um fio preto conectado ao solo, um fio branco / amarelo conectado à unidade de controle e um fio vermelho conectado à fonte de alimentação.
A função do servo motor é receber um sinal de controle que representa uma posição de saída desejada do servo eixo e aplicar energia ao seu motor DC até que seu eixo gire para essa posição.
Ele usa o dispositivo de detecção de posição para descobrir a posição rotacional do eixo, de forma que saiba para que lado o motor deve girar para mover o eixo para a posição instruída. O eixo normalmente não gira livremente semelhante a um motor DC, no entanto, pode girar apenas 200 graus.

Servo motor
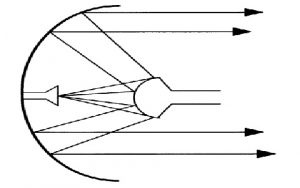
A partir da posição do rotor, um campo magnético giratório é criado para gerar toque de forma eficiente. A corrente flui no enrolamento para criar um campo magnético giratório. O eixo transmite a potência de saída do motor. A carga é conduzida por meio do mecanismo de transferência. Terra rara de alta função ou outro ímã permanente é posicionado externamente ao eixo. O codificador óptico sempre observa o número de rotações e a posição do eixo.
Funcionamento de um servo motor
O servo motor consiste em um motor CC, um sistema de engrenagens, um sensor de posição e um circuito de controle. Os motores DC são alimentados por uma bateria e funcionam em alta velocidade e baixo torque . O conjunto de engrenagem e eixo conectado aos motores CC reduz essa velocidade para velocidade suficiente e torque mais alto. O sensor de posição detecta a posição do eixo a partir de sua posição definida e fornece as informações ao circuito de controle. O circuito de controle decodifica os sinais do sensor de posição e compara a posição real dos motores com a posição desejada e controla a direção de rotação do motor DC para obter a posição necessária. O servo motor geralmente requer uma alimentação DC de 4,8 V a 6 V.
Controlando um servo motor
Um servo motor é controlado controlando sua posição usando a Técnica de Modulação por Largura de Pulso. A largura do pulso aplicado ao motor é variada e enviada por um período fixo de tempo.
A largura de pulso determina a posição angular do servo motor. Por exemplo, uma largura de pulso de 1 ms causa uma posição angular de 0 graus, enquanto uma largura de pulso de 2 ms causa uma largura angular de 180 graus.
Vantagens:
- Se uma carga pesada for colocada no motor, o acionador aumentará a corrente para a bobina do motor enquanto tenta girar o motor. Não há condição de descompasso.
- A operação em alta velocidade é possível.
Desvantagens:
- Visto que o servomotor tenta girar de acordo com os pulsos de comando, mas atrasa, ele não é adequado para o controle preciso da rotação.
- Custo mais alto.
- Quando parado, o rotor do motor continua a se mover para frente e para trás um pulso, de modo que não é adequado se você precisar evitar a vibração
7 aplicações de servo motores
Os servomotores são usados em aplicações que requerem variações rápidas de velocidade sem que o motor fique superaquecido.
- Nas Indústrias, eles são usados em máquinas-ferramentas, embalagens, automação de fábrica, manuseio de materiais, conversão de impressão, linhas de montagem e muitas outras aplicações exigentes, robótica, maquinário CNC ou manufatura automatizada.
- Eles também são usados em aviões controlados por rádio para controlar o posicionamento e o movimento dos elevadores.
- Eles são usados em robôs por causa de sua ativação e desativação suaves e do posicionamento preciso.
- Eles também são usados pela indústria aeroespacial para manter o fluido hidráulico em seus sistemas hidráulicos.
- Eles são usados em muitos brinquedos controlados por rádio.
- Eles são usados em dispositivos eletrônicos, como DVDs ou reprodutores de discos Blue-ray para estender ou reproduzir as bandejas de disco.
- Eles também estão sendo usados em automóveis para manter a velocidade dos veículos.
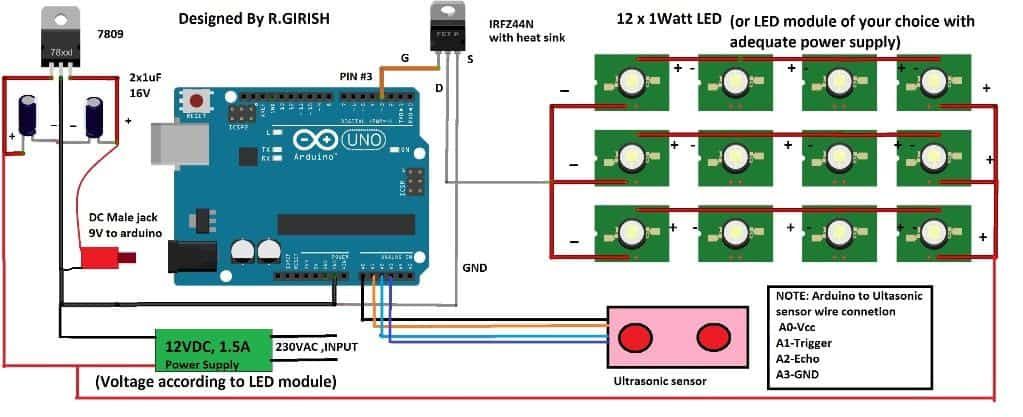
Circuito de Aplicação do Servo Motor
A partir do circuito de aplicação abaixo: Cada motor tem três entradas: VCC, terra e um sinal de onda quadrada periódica. A largura de pulso da onda quadrada determina a velocidade e direção dos servo motores. Em nosso caso, precisamos apenas mudar a direção para permitir que o dispositivo se mova para frente, para trás e vire à esquerda e à direita. Se a largura de pulso estiver abaixo de um determinado período de tempo, o motor se moverá no sentido horário. Se a largura de pulso exceder esse intervalo de tempo, o motor irá se mover no sentido anti-horário. O intervalo de tempo intermediário pode ser ajustado por meio de um potenciômetro embutido no motor.

3 diferenças entre motor de passo e servo motor:
- Os motores de passo têm um grande número de pólos, pares magnéticos gerados por um ímã permanente ou uma corrente elétrica. Servo motores têm poucos pólos, cada pólo oferece um ponto de parada natural para o eixo do motor.
- O torque de um motor de passo em baixas velocidades é maior do que um servo motor do mesmo tamanho.
- A operação do motor de passo é sincronizada pela saída de sinais de pulso de comando do gerador de pulso. Em contraste, a operação do servomotor fica atrás dos pulsos de comando.
Agora que você tem uma ideia sobre o funcionamento do servo medidor, se tiver alguma dúvida sobre esse assunto ou os projetos elétricos e eletrônicos deixe os comentários abaixo.
Crédito da foto
- Servo Motor por Wikimedia









{kind=link}