O post explica um obstáculo simples para evitar o circuito do robô sem microcontrolador e sem usar circuitos de driver de motor especiais ou ICs. A ideia foi solicitada pelo Sr. Faiyyaz
O design
Basicamente, está na forma de um veículo em movimento que é capaz de detectar e evitar potenciais obstáculos em seu caminho e mudar sua direção de forma adequada para que seu movimento permaneça ininterrupto, simples!
A operação é, portanto, automática, sem qualquer intervenção manual ou humana.
A ideia apresentada de um robô evitando obstáculos sem microcontrolador, como o nome sugere, não emprega um microcontrolador e, portanto, é extremamente simples de construir e adequada para qualquer novo amador.
Ao projetar o circuito, percebi que, para implementar o princípio, pelo menos alguns módulos de sensores de obstáculos seriam necessários, porque o uso de um único módulo pode causar o movimento errático do motor e pode não ajudar um desvio suave ou giro do veículo em direção um caminho livre.
A configuração do motor do veículo é bastante semelhante ao carrinho de brinquedo com controle remoto que eu havia discutido em um dos posts anteriores.
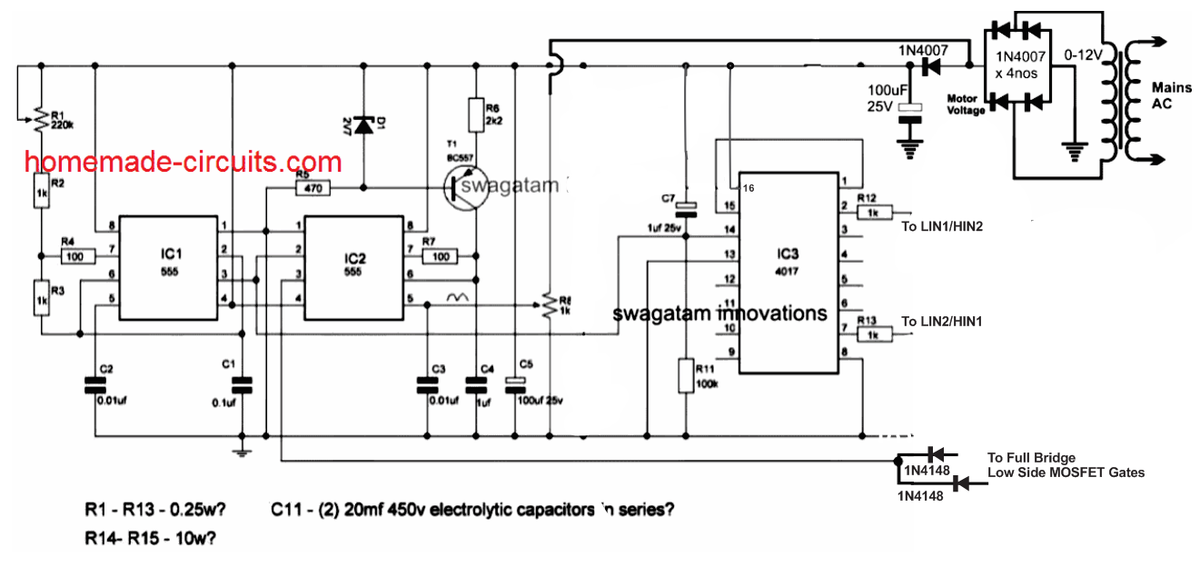
O diagrama a seguir representa um dos módulos do sistema e, portanto, dois ou um par de tais módulos seriam necessários nos lados direito e esquerdo do veículo.
A ideia é simples e funciona sem microcontrolador e sem CIs especiais de driver de motor. Isso significa que você pode fazer isso sem qualquer tipo de codificação e sem usar qualquer tipo de driver de motor complexo IC ... e o circuito permite que você use qualquer motor DC, independentemente de sua potência, portanto, mesmo obstáculos de alta potência evitando veículos podem ser feitos neste circuito, normalmente utilizados em shoppings e pontos de venda semelhantes.
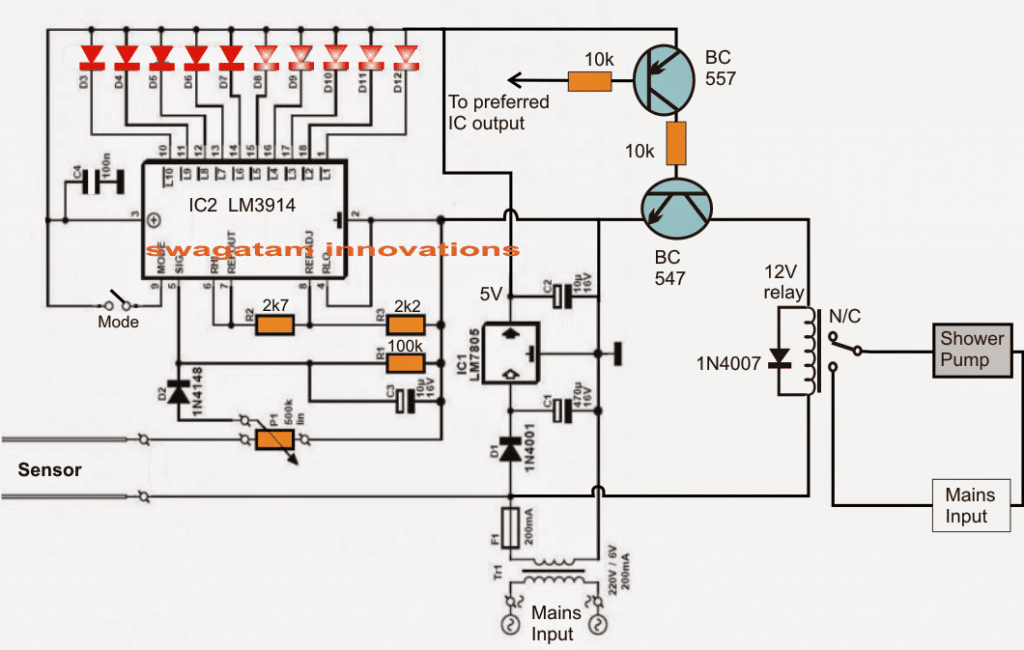
Diagrama de circuito

Agora, vamos tentar entender o circuito acima com a ajuda da seguinte explicação:
Como funciona
O IC 555 é configurado como um transmissor IR e é definido para gerar uma frequência constante de 38 kHz, enquanto o circuito transistorizado adjacente é configurado como o estágio receptor ou o estágio do sensor IR.
Vamos supor que seja o módulo do lado direito e suponha que este módulo seja o primeiro a detectar um obstáculo no caminho.
Portanto, assim que um obstáculo é detectado, a frequência de 38 kHz gerada pelo 555 IC é refletida em direção ao sensor do circuito receptor adjacente.
O receptor ativa instantaneamente os transistores associados, de modo que o transistor driver final é inibido de conduzir.
Agora, o motor que é controlado por este transistor deve estar localizado no lado esquerdo do veículo, ou seja, no lado oposto deste módulo ... da mesma forma, o motor localizado no lado direito é realmente controlado pelo módulo do lado esquerdo .
Consequentemente, quando o módulo detector de obstáculos do lado direito assumido acima é ativado, ele para o motor do lado esquerdo, enquanto o motor do lado direito pode se mover normalmente.
Esta situação resulta no veículo sendo forçado a fazer um desvio para o lado esquerdo ... o que significa que agora o módulo esquerdo assumido começa a receber sinais de obstáculo ainda mais fortes e continua forçando o veículo a prosseguir com mais força no desvio em curso até que tenha evitado completamente o obstáculo . O módulo agora para de receber os sinais de obstáculo e o veículo começa a se mover normalmente em seu novo caminho.
Enquanto o desvio acima é realizado, o módulo do lado esquerdo é forçado a ficar cada vez mais isolado e afastado do obstáculo para que não tenha a oportunidade de interferir no procedimento e permitir um desvio limpo e suave do veículo.
Exatamente os mesmos procedimentos são implementados no caso de o módulo do lado esquerdo sentir o obstáculo à frente do módulo do lado direito, onde o veículo é forçado a se mover cada vez mais forte em direção ao lado direito.
Também podemos ver um estágio de circuito 'desabilitado' no módulo que está interconectado entre os módulos do lado esquerdo e direito. Este estágio é introduzido propositalmente para garantir que ambos os módulos nunca sejam ativados juntos.
Portanto, por exemplo, se o módulo do lado esquerdo se torna o primeiro a detectar um obstáculo, ele desativa imediatamente o módulo do lado direito e inicia o desvio do veículo para a direita e vice-versa.
O sensor IC pode ser um série TSOP17XX padrão
Para obter mais informações sobre o sensor IC acima, você pode aprender como conectar TSOP1738 IC
E o motor deve ser equipado com caixas de engrenagens para que o movimento seja originalmente mantido em um nível controlado.
Configuração da roda
A configuração completa do módulo esquerdo e direito e as conexões elétricas associadas podem ser testemunhadas na figura abaixo:

Atualizar
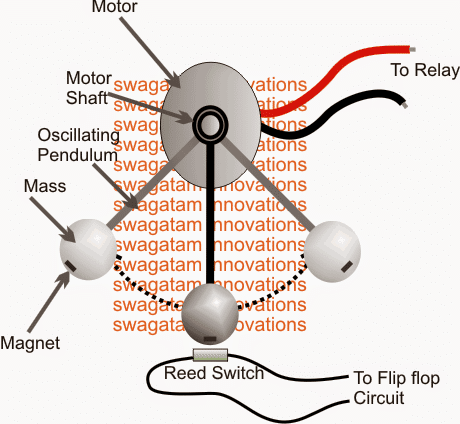
Um pouco de reflexão nos diz que o simples obstáculo acima evitando o circuito do robô também poderia ser implementado usando um único módulo, em vez dos dois.
No entanto, um único módulo permitiria ao veículo realizar um desvio de um lado cada vez que detectasse um obstáculo, portanto, o sistema poderia ser configurado para realizar um desvio no sentido horário ou no sentido anti-horário, dependendo de qual motor está conectado ao circuito para as ações.
O exemplo de configuração pode ser visualizado na seguinte imagem:

No entanto, parece que há um problema com a configuração do motor único acima. Suponha que o veículo encontre um canto angular direito no lado esquerdo. Isso forçará o veículo a continuar se movendo no sentido anti-horário, até que faça um retorno e comece a se mover de volta na mesma direção de onde partiu. Isso não é algo que o usuário apreciaria.
Anterior: Resistores SMD - Introdução e Trabalho Próximo: Como funciona um acelerômetro