O circuito VFD trifásico apresentado ( desenhado por mim ) pode ser usado para controlar a velocidade de qualquer motor CA trifásico com escova ou mesmo um motor CA sem escova. A ideia foi solicitada pelo Sr. Tom
Usando o VFD
O circuito VFD trifásico proposto pode ser aplicado universalmente para a maioria dos motores CA trifásicos onde a eficiência da regulação não é muito crítica.
Pode ser usado especificamente para controlar velocidade do motor de indução em gaiola de esquilo com um modo de circuito aberto e, possivelmente, também no modo de circuito fechado, que será discutido na parte posterior do artigo.
Módulos necessários para inversor trifásico
Para projetar o VFD trifásico proposto ou o circuito de acionamento de frequência variável, os seguintes estágios fundamentais do circuito são essencialmente necessários:
- Circuito controlador de tensão PWM
- Circuito driver ponte H trifásico de lado alto / lado baixo
- Circuito gerador trifásico
- Circuito conversor de tensão para frequência para gerar parâmetros V / Hz.
Vamos aprender os detalhes de funcionamento das etapas acima com a ajuda da seguinte explicação:
Um circuito controlador de tensão PWM simples pode ser testemunhado no diagrama abaixo:

O controlador PWM
Já incorporei e expliquei o funcionamento do estágio do gerador PWM acima, que é basicamente projetado para gerar uma saída PWM variável no pino 3 do IC2 em resposta ao potencial aplicado no pino 5 do mesmo IC.
O pré-ajuste de 1K mostrado no diagrama é o botão de controle RMS, que pode ser ajustado apropriadamente para adquirir a quantidade proporcional desejada de tensão de saída na forma de PWMs no pino 3 de IC2 para processamento posterior. Isso é definido para produzir uma saída correspondente que pode ser equivalente à rede elétrica de 220 V ou 120 V CA RMS.
O circuito do driver H-Bridge
O próximo diagrama abaixo mostra um circuito driver trifásico de ponte H de chip único usando o IC IRS2330.
O design parece simples, visto que a maioria das complexidades é tratada pelos circuitos sofisticados embutidos no chip.
Um sinal trifásico bem calculado é aplicado nas entradas HIN1 / 2/3 e LIN1 / 2/3 do IC por meio de um estágio gerador de sinal trifásico.
As saídas do IC IRS2330 pode ser visto integrado com 6 mosfets ou rede de ponte IGBTs, cujos drenos estão devidamente configurados com o motor que precisa ser controlado.
As portas mosfet / IGBT do lado inferior são integradas com o pino # 3 IC2 do estágio do circuito gerador PWM discutido acima para iniciar a injeção PWM no estágio mosfet da ponte. Em última análise, esta regulação ajuda o motor a obter a velocidade desejada de acordo com as configurações (por meio da predefinição 1 k no primeiro diagrama).

No diagrama a seguir, visualizamos o circuito gerador de sinal trifásico necessário.

Configurando o circuito gerador trifásico
O gerador trifásico é construído em torno de um par de chips CMOS CD4035 e CD4009 que gera sinais trifásicos dimensionados com precisão através das pinagens mostradas.
A frequência dos sinais trifásicos depende dos relógios de entrada alimentados, que devem ser 6 vezes o sinal trifásico pretendido. Ou seja, se a frequência trifásica necessária for 50 Hz, o relógio de entrada deve ser 50 x 6 = 300 Hz.
Também implica que os relógios acima podem ser variados a fim de variar a freqüência efetiva do IC do driver que por sua vez seria responsável por variar a freqüência operacional do motor.
No entanto, uma vez que a alteração de frequência acima precisa ser automática em resposta à variação da tensão, um conversor de tensão para frequência torna-se essencial. O próximo estágio discute uma tensão simples e precisa para o circuito conversor de frequência para a implementação necessária.
Como criar uma relação V / F constante
Normalmente, em motores de indução, a fim de manter uma eficiência ótima da velocidade do motor e do toque, a velocidade de escorregamento ou a velocidade do rotor precisa ser controlada, o que por sua vez se torna possível mantendo uma relação V / Hz constante. Uma vez que o fluxo magnético do estator é sempre constante, independentemente da frequência de alimentação de entrada, a velocidade do rotor torna-se facilmente controlável por mantendo a relação V / Hz constante .
Em um modo de malha aberta, isso pode ser feito aproximadamente mantendo relações V / Hz predeterminadas e implementando-as manualmente. Por exemplo, no primeiro diagrama, isso pode ser feito ajustando adequadamente o R1 e o preset 1K. R1 determina a frequência e o 1K ajusta o RMS da saída, portanto, ajustando adequadamente os dois parâmetros, podemos impor a quantidade necessária V / Hz manualmente.
No entanto, para obter um controle relativamente preciso do torque e da velocidade de um motor de indução, temos que implementar uma estratégia de malha fechada, em que os dados da velocidade de escorregamento precisam ser alimentados ao circuito de processamento para um ajuste automático da relação V / Hz para que isso o valor sempre permanece próximo da constante.
Implementando o Feedback de Loop Fechado
O primeiro diagrama nesta página pode ser modificado adequadamente para projetar a regulação V / Hz automática de malha fechada conforme mostrado abaixo:

Na figura acima, o potencial no pino # 5 do IC2 determina a largura do SPWM que é gerado no pino # 3 do mesmo IC. Os SPWM são gerados comparando a amostra de ondulação de 12 V da rede no pino 5 com a onda triangular no pino 7 do IC2, e isso é alimentado para os mosfets do lado inferior para o controle do motor.
Inicialmente, este SPWM é definido em algum nível ajustado (usando 1K perset) que aciona as portas IGBT do lado inferior da ponte trifásica para iniciar o movimento do rotor no nível de velocidade nominal especificado.
Assim que o rotor do rotor começa a girar, o tacômetro conectado com o mecanismo do rotor faz com que uma quantidade adicional proporcional de tensão se desenvolva no pino # 5 do IC2, isso proporcionalmente faz com que os SPWMs se tornem mais largos, causando mais tensão às bobinas do estator do motor. Isso causa um aumento na velocidade do rotor causando mais tensão no pino 5 do IC2, e isso continua até que a tensão equivalente do SPWM não seja mais capaz de aumentar e a sincronização do rotor do estator atinja um estado estacionário.
O procedimento acima segue autoajustando-se ao longo dos períodos de operação do motor.
Como fazer e integrar o tacômetro
Um projeto simples de tacômetro pode ser visto no diagrama a seguir, ele pode ser integrado ao mecanismo do rotor de forma que a frequência de rotação seja capaz de alimentar a base do BC547.

Aqui, os dados de velocidade do rotor são coletados de um sensor de efeito Hall ou de uma rede de LED / Sensor IR e alimentados na base de T1.
T1 oscila nesta frequência e ativa o circuito do tacômetro feito pela configuração apropriada de um circuito monoestável IC 555.
A saída do tacômetro acima varia proporcionalmente em resposta à frequência de entrada na base de T1.
À medida que a frequência aumenta, a tensão na saída D3 do lado direito extremo também aumenta e vice-versa, e ajuda a manter a relação V / Hz em um nível relativamente constante.
Como controlar a velocidade
A velocidade do motor usando V / F constante pode ser conseguida alterando a entrada de frequência na entrada de relógio do IC 4035. Isso pode ser conseguido alimentando uma frequência variável de um circuito astável IC 555 ou qualquer circuito astável padrão para a entrada de relógio de IC 4035.
Mudar a frequência muda efetivamente a frequência de operação do motor, o que reduz a velocidade de escorregamento.
Isso é detectado pelo tacômetro, e o tacômetro reduz proporcionalmente o potencial no pino # 5 do IC2 que por sua vez reduz proporcionalmente o conteúdo de SPWM no motor e, conseqüentemente, a tensão para o motor é reduzida, garantindo a variação da velocidade do motor com a correta relação V / F necessária.
Um conversor caseiro de V para F

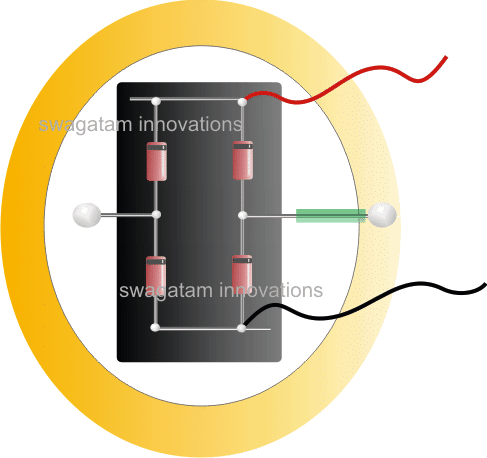
No circuito conversor de tensão para frequência acima, um IC 4060 é usado e sua resistência dependente de frequência é influenciada por um conjunto LED / LDR para as conversões pretendidas.
O conjunto LED / LDR é selado dentro de uma caixa à prova de luz e o LDR é posicionado em um resistor dependente de frequência de 1M do IC.
Uma vez que a resposta do LDR / LDR é bastante linear, a iluminação variável do LED no LDR gera uma frequência de variação proporcional (aumentando ou diminuindo) no pino 3 do IC.
O FSD ou a faixa V / Hz do estágio pode ser definida configurando apropriadamente o resistor de 1M ou mesmo o valor C1.
O LED é a tensão derivada e iluminada através dos PWMs do primeiro estágio do circuito PWM. Isso implica que, conforme os PWMs variam, a iluminação do LED também varia, o que, por sua vez, daria origem a um aumento ou diminuição proporcional da frequência no pino 3 do IC 4060 no diagrama acima.
Integrando o conversor com VFD
Esta frequência variável do IC 4060 agora simplesmente precisa ser integrada com a entrada de relógio do IC CD4035 do gerador trifásico.
Os estágios acima constituem os ingredientes principais para fazer um circuito VFD trifásico.
Agora, seria importante discutir sobre o barramento CC necessário para alimentar os controladores de motor IGBT e os procedimentos de configuração para todo o projeto.
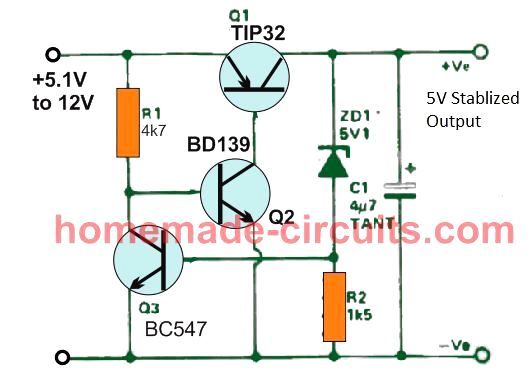
O barramento CC aplicado através dos trilhos da ponte H do IGBT pode ser obtido retificando a entrada de rede trifásica disponível usando a seguinte configuração de circuito. Os trilhos IGBT DC BUS são conectados através dos pontos indicados como 'carga'

Para uma fonte monofásica, a retificação pode ser implementada usando a configuração de rede de ponte de 4 diodos padrão.
Como configurar o circuito VFD trifásico proposto
Isso pode ser feito de acordo com as seguintes instruções:
Depois de aplicar a tensão do barramento CC nos IGBTs (sem o motor conectado), ajuste a predefinição PWM 1k até que a tensão nos trilhos se torne igual às especificações de tensão do motor pretendidas.
Em seguida, ajuste o preset IC 4060 1M para ajustar qualquer uma das entradas IC IRS2330 para o nível de frequência correto exigido de acordo com as especificações do motor fornecidas.
Após a conclusão dos procedimentos acima, o motor especificado pode ser conectado e alimentado com diferentes níveis de tensão, parâmetro V / Hz e confirmado para operações V / Hz automáticas sobre o motor conectado.
Anterior: Como construir um circuito de iluminação crescente Próximo: Circuito de amaciante de água explorado