O post explica um circuito controlador de nível de água simples aplicável para alternar automaticamente duas bombas de água submersíveis em resposta a uma mudança de nível de água predeterminada. Todo o circuito é construído usando apenas um único IC e algumas outras partes passivas. A ideia foi solicitada por um dos membros interessados deste blog.
Especificações técnicas
Você pode me ajudar com este problema: Em um poço subterrâneo, existem dois bombas submersíveis com interruptores flutuantes (P1 e P2) instalado para atingir algum nível de redundância.
Para usar as duas bombas igualmente, queremos alternar entre P1 e P2 sempre que um nível de água predefinido for atingido. Ou seja, na primeira vez que o nível predefinido for alcançado, P1 deve iniciar e bombear a água para fora. Da próxima vez, quando o nível predefinido for alcançado, P2 deve iniciar e bombear a água para fora.
Na próxima ocasião será a vez de P1 e assim por diante. O que precisamos é de um controle de relé 'alternado' operando P1 e P2 curva a curva.
O design
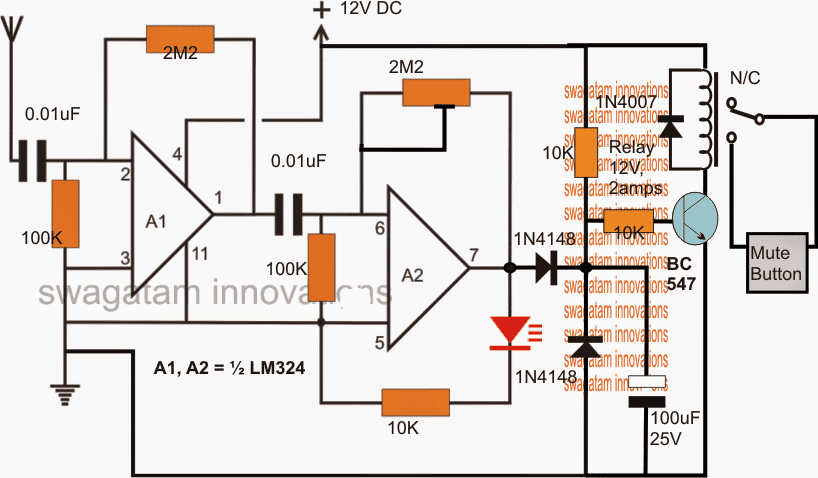
O circuito mostrado de um controlador de bomba submersível automática pode ser entendido como dado em:
Como pode ser visto, todo o circuito é construído em torno de quatro Portas NAND de um único IC 4093 .
As portas N1 - N3 formam um circuito flip-flop padrão em que a saída de N2 alterna de alta para baixa e vice-versa em resposta a cada gatilho positivo na junção de C5 / R6.
N4 é posicionado como um buffer cuja entrada é terminada como a entrada de detecção para detectando a presença de água sobre um nível fixo predeterminado dentro do tanque.
O link do solo ou do negativo do circuito também está estacionado no tanque de água próximo e paralelo à entrada de detecção de N4 acima.
Presumindo inicialmente que não há água no tanque, a entrada de N4 fica alta por meio de R8, resultando em uma saída baixa na junção de C5 / R6.
Isso deixa N1, N2, N3 e toda a configuração em uma posição de espera sem resposta, resultando em T1, T2 em uma posição desligada.
Isso mantém os respectivos relés REL1 / 2 em uma posição desativada com seus contatos nos níveis N / C.
Aqui, os contatos REL2 garantem que a tensão de alimentação permaneça cortada durante a ausência de água no tanque.
Agora, suponha que a água no tanque comece a subir e faça uma ponte sobre o solo com a entrada de N4, tornando-a baixa, isso gera um sinal alto na saída de N4.
Esta alta na saída de N4 ativa T2, REL2 e também inverte a saída de N2 de modo que REL1 também seja ativado. Agora o REL2 permite que a tensão da rede elétrica alcance os motores.
E com REL1 ativado também atua a bomba P2 através de seus contatos N / O.
Assim que o nível da água desce abaixo do ponto pré-ajustado, reverte-se a situação na entrada do N4, criando uma baixa na sua saída.
No entanto, este sinal baixo de N4 não produz nenhum efeito em REL1, pois N1, N2, N3 mantêm REL1 na posição ativada.
Sendo REL2 diretamente dependente da saída N4, desliga-se, cortando a alimentação dos motores e desligando P2.
Durante o próximo ciclo, quando o nível de água atinge os pontos de detecção, a saída N4 alterna REL2 como de costume, permitindo que a alimentação da rede elétrica alcance os motores, e também alterna REL1, mas desta vez para o contato N / C.
Isso instantaneamente coloca P1 em operação porque P1 está configurado com o N / C de REL1, portanto, descansando P2 e ativando P1 nesta ocasião.
A inversão alternativa acima de P1 / P2 continua se repetindo com os ciclos em andamento de acordo com as operações acima.
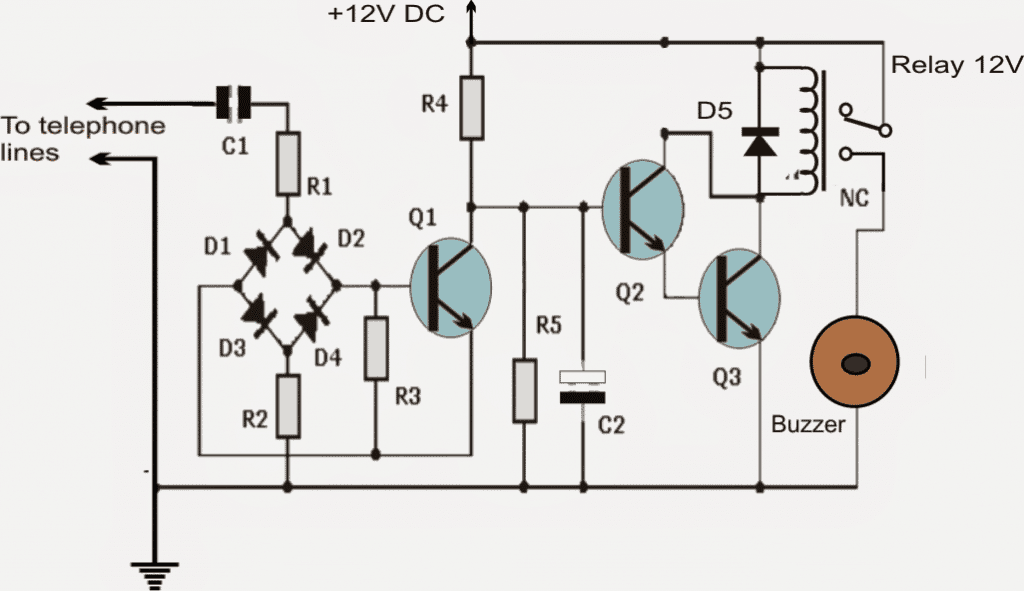
Diagrama de circuito

Lista de peças para o circuito controlador de bomba submersível automática acima:
- R3, R9 = 10K,
- R4, R5, R8 = 2M2,
- R6, R7 = 39K,
- R4, R5 = 0,22, DISC,
- C6 = 100µF / 25V,
- D4, D5 = 1N4148,
- C4, C5, C7 = 0,22uF
- T1, T2 = BC 547,
- N1 --- N4 = IC4093,
- Relés = 12V, SPDT, contatos de 20 amperes relé dides = 1N4007
Anterior: Como Cascatear IC 4033 em Display de Contador de Múltiplos Dígitos Próximo: Circuito temporizador de 1 a 10 minutos