UM drone multirotor é um tipo de UAV com vários rotores, como quatro rotores, seis rotores, oito rotores ou até mais, com base em seu design e uso. Mas os rotores extras deste drone podem aumentar a capacidade de carga útil, o tempo de voo, a estabilidade etc. Estes são os mais baratos e mais fáceis drones , fornecendo alto controle sobre o enquadramento e a posição. Assim, estes são ideais para vigilância e fotografia aérea. Drones multirotores estão disponíveis em diferentes tipos, como drones multi-rotores trimotorores, hexacopter, octocopter e rotor coaxial. Esses são os tipos de UAV mais comuns, e cada tipo de drone difere em seu desempenho, design e habilidade. Este artigo elabora um dos tipos de drones multirotores, como o quadcopter, seu trabalho e aplicativos.
O que é um quadcopter?
Um quadcopter é um tipo de UAV que é alimentado por quatro rotores , onde cada rotor tem um motor e uma hélice. Um drone quadcopter utiliza quatro rotores para elevação e propulsão, para que possa decolar e aterrar verticalmente e desviar. Assim, os dois rotores deste drone giram no sentido horário, enquanto os outros dois rotores giram no sentido anti -horário para cancelar o torque e dar constante controle de vôo. Isso pode ser controlado manualmente ou de forma independente, por isso é um dos tipos mais populares de drones devido à sua simplicidade, estabilidade e manobrabilidade.
Os quadcopters são diferenciados por seu design de quatro rotores para controlar a aerodinâmica, mecânica e eletrônica avançados. Seu design exclusivo fornece manobrabilidade e estabilidade superior do que os helicópteros de rotor único usual.
História do Quadcopter:
O quadcopter é um tipo de drone multi-rotor que evoluiu extensivamente de seus projetos iniciais. Portanto, a história passo a passo do quadcopter é discutida abaixo.
- Jacques e Louis Bréguet em 1907 desenvolveram e testaram o giroplano nº 1. É uma idéia inicial do quadcopter, alcançando a decolagem, mas enfrentando instabilidade com base em sistemas aeroespaciais transversais.
- Etienne Oehmichen criou outro quadcopter antigo como Oehmichen em 1920, que demonstra voo e estabelecendo um recorde global.
- Na Marinha dos EUA, 1930 experimentou aeronaves controladas por rádio, o que levou ao desenvolvimento de drones Curtiss N2C-2.
- O Bell Boeing Quad Tiltrotor, em 1990, combinou os designs de asa fixa e quadcopter para aplicações de transporte militar.
- A Amazon propôs uma tecnologia de drones comerciais em 2013 para um sistema de entrega
- A Airbus desenvolveu um quadcopter movido a bateria em 2018 para os táxis aéreos urbanos buscarem operação autônoma em algum momento.
- Atualmente, esses drones são amplamente utilizados para fins diferentes, como vôo recreativo, fotografia aérea, entrega, vigilância, etc.
Componentes de um quadcopter
Um quadcopter foi projetado com várias chaves componentes , que são explicados abaixo.

Quadro
O quadro quadcopter possui braços que seguram motores, baterias, controlador de vôo, etc.
Motores
O quadcopter inclui quatro motores, que são usados para levantá -lo. Mas existem diferentes tipos de motores disponíveis no mercado.
Esc
Desde o quadcopter motores Geralmente requer 3 suprimentos de três fases, não podemos usá-lo como uma oferta direta. Portanto, exigimos que o ESC altere os sinais do controlador e os envie aos motores para controlar sua velocidade.
Hélices
As hélices são um componente significativo do drone. São lâminas giratórias que funcionam como asas no seu drone e criam o fluxo de ar para levantar o drone no ar.
Controlador de vôo
A principal função do controlador de vôo é direcionar o RPM de cada motor em resposta à entrada. Portanto, o comando piloto para o quad-compota ajuda a avançar e é alimentado no controlador de vôo para decidir como controlar os motores, consequentemente.
Transmissor RC e receptor
Transmissores de rádio e controle de receptores eletricidade , o que resulta em transmissão de dados úteis através do espaço ou da atmosfera. Eles usam sinais de rádio para enviar comandos sem fio através de uma frequência de rádio acima do receptor de rádio. Portanto, está conectado ao controlador de vôo do quadcopter, que é controlado remotamente.
Bateria
Um quadcopter usa uma fonte de energia da bateria para acionar todos os sistemas do seu drone, permitindo que ele voe. Por fim, é necessária uma bateria de polímero de lítio (LIPO) para alimentar o quadcopter; portanto, o tempo de voo do quadcopter depende principalmente da capacidade da bateria. A seleção de uma bateria depende principalmente de seu tamanho, tensão, classificação C, capacidade etc.
Variado
Os diversos incluem pequenos acessórios, como diferentes cabos de jumper e conectores de bala, que tornam seu quadcopter perfeito e mais estável.
Como funciona um quadcopter?
Os quadcopters podem voar com quatro rotores, onde cada um inclui um motor e uma hélice para produzir controle de elevação e movimento dentro do ar. Esses drones podem atingir o vôo alterando a velocidade de cada rotor, afetando assim a quantidade de elevação e impulso gerados, permitindo o movimento controlado em todas as direções.
O voo de um quadcopter depende do princípio de controle e controle preciso dos quatro rotores. Assim, aqui está um colapso de seu trabalho.
- Uma vez que todos os quatro rotores giram, eles produzem fluxo de ar para baixo e empurram para cima. Sempre que o total gerado pelos rotores excede o peso do quadro, ele decola.
- Para flutuar no lugar, o controlador de vôo altera todas as velocidades dos quatro rotores para produzir impulso suficiente para compensar a gravidade.
- A velocidade dos quatro rotores é igualmente aumentada para gerar mais impulso em comparação com o peso. Portanto, a velocidade será reduzida para descer.
- Os rotores traseiros giram com mais facilidade e avançam do que os rotores frontais, e inclinar o quadcopter para a frente produz impulso. A velocidade do movimento para trás dos rotores dianteiros pode ser alcançado aumentando.
- Os rotores do lado direito deste drone giram mais rápido para se mover para a esquerda do que os rotores esquerdo e inclinar o drone quadcopter para a esquerda. Aqui, o movimento do lado direito pode ser alcançado aumentando a velocidade do rotor esquerdo.
- Para girar a guinada no sentido horário, dois rotores que são diagonalmente opostos giram mais rapidamente, enquanto os outros dois rotores giram mais devagar, criando assim uma força rotativa. Ao reverter isso, a rotação no sentido anti-horário pode ser alcançada.
- Os dados do sensor podem ser monitorados constantemente pelo controlador de vôo. Por isso, faz micro-ajustes na velocidade de cada motor para manter a estabilidade e executar os comandos do piloto.
Tipos de quadcopters
Existem diferentes tipos de quadcopters disponíveis no mercado com base em suas formas de quadro e usos pretendidos, que são explicados abaixo.

X quadcopter ou xfiguração X:
Esse tipo de quadcopter possui o design mais popular que fornece um bom equilíbrio e manobrabilidade de estabilidade. É usado em uma variedade de aplicações como videografia, corrida, fotografia aérea, voo acrobático, FPV Racing,
H quadcopter ou configuração H:
H Quadcopter possui um quadro em forma de H, que fornece melhor estabilidade. Portanto, esse drone pode ser usado na fotografia aérea, com base na devogação.
+ Quadcopter ou + configuração:
Este quadcopter se destaca em faixas de vôo retas, incluindo posições aerodinâmicas da hélice eficiente, freqüentemente usada em vôo acrobático. É usado em esquemas de controle mais simples de determinadas aplicações.
Y4 Quadcopter ou Y4 Configuration:
Esse drone é semelhante a um tricóptero com três braços, mas seu braço traseiro inclui dois motores que são montados coaxialmente para um melhor controle de guinada e poder de elevação.
Quadcopter a-cauda ou cauda em V:
Esse drone é semelhante ao Y4quadcopter, exceto com motores traseiros localizados em um ângulo em uma forma A ou V, que fornece mais controle de guinada.
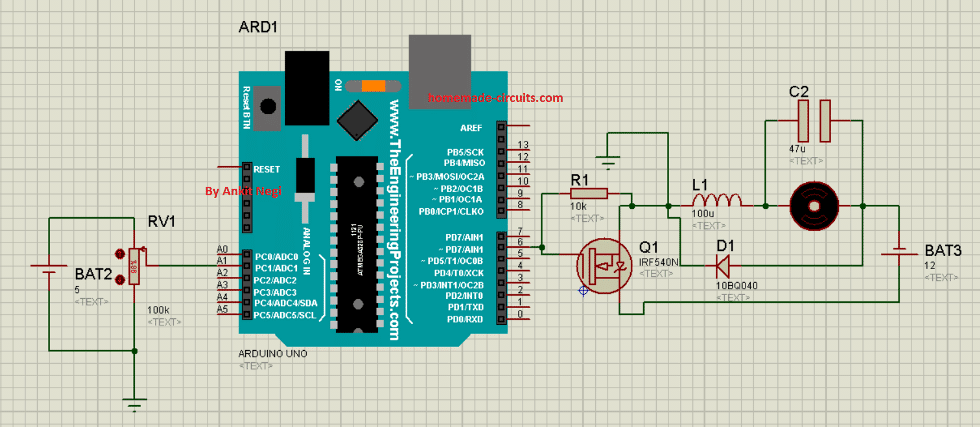
Quadcopter usando Arduino
Um controlador de vôo é o cérebro do quadcopter. Geralmente, existem muitos controladores de vôo pré-descartados também disponíveis no mercado com menos custo. Portanto, um controlador de vôo projetado com Arduino para um quadcopter é mostrado abaixo. O Multiwii é um famoso software de controlador de vôo usado para quadcopters DIY.
Então, vamos projetar um quadcopter com Arduino, como mostrado abaixo. Não é apenas um quadcopter, mas também uma máquina de código aberto. Os componentes necessários para fazer deste quadcopter usando Arduino incluem: ESC, Bluetooth , MPU-6050, resistor 330-OHM, LIDERADO indicador, receptor, Arduino Nano R3 e fios de conexão.

Conexões:
As conexões desta interface seguem como;
- Conecte o pino D3 do Arduino Nano ao pino de sinal ESC 1.
- Conecte o pino D9 do Arduino Nano ao pino de sinal ESC 3.
- Conecte o pino D10 do Arduino Nano ao pino de sinal ESC 2.
- Conecte o pino D11 do Arduino Nano ao pino de sinal ESC 4.
- Conecte o pino TX do módulo Bluetooth ao pino RX do Arduino.
- Conecte o pino RX do módulo Bluetooth ao pino TX do Arduino.
- O pino A4 do Arduino está conectado ao pino SDA do MPU-6050.
- O pino A5 do Arduino está conectado ao pino SCL do MPU-6050.
- Conecte um terminal do LED ao pino D8 de Arduino e ao outro terminal à fonte de alimentação através de um resistor.
- O pino D2 do Arduino está conectado ao pino do acelerador do receptor.
- Conecte o pino D4 de Arduino ao alfinete do receptor da Eleroron.
- O pino D5 do Arduino é conectado ao pino Ailerons do receptor.
- O pino D6 de Arduino é conectado ao pino do leme do receptor.
- O pino D7 do Arduino é conectado ao aux 1 pino do receptor.
Trabalhando
Agora conecte todos os terrenos com os terminais terrestres de Arduino. Por isso, inclui todos os terrenos do receptor, o módulo Bluetooth, os terrenos da ESC e os terrenos da MPU. Depois disso, forneça uma conexão de fonte de energia de 5V conectando o GND da bateria ao GND de todos os componentes. O fio de cores vermelho é conectado ao arduino, pino de 5V, módulo Bluetooth e MPU.
Agora forneça a placa e o Arduino está pronto para adicionar código através de um computador. Normalmente, o Arduino Flight Controller trabalha com alguma programação de computador. Para isso, você precisa baixar primeiro o Multiwii 2.4 e pode baixar o código diretamente.
É um software FC muito popular usado para multi-rotores através de uma grande comunidade. Como este software suporta uma variedade de multi-copters com recursos superiores, como controle Bluetooth, com seu smartphone, barômetro, tela OLED, posição do GPS Hold e retornar a casa, magnetômetro, tiras de LED etc.
Você notará como move o controlador de vôo imediatamente, os valores de dados do acelerômetro e do giroscópio podem ser notados na tela. Portanto, a orientação FC pode ser vista na parte inferior. Nesta interface, você pode alterar os valores do PID de sinal e ajustar o quadcopter para igualar suas preferências pessoais. Nesta interface, os modos de vôo também podem ser atribuídos a certas posições do comutador auxiliar. Agora, tudo o que você precisa fazer é encontrar uma posição para o seu controlador de vôo Arduino no quadro que está definido para atingir o céu.
O Arduino Quadcopter funciona com todos os componentes necessários para criar impulso, permitindo o vôo e a manobrabilidade. Portanto, o Microcontrolador Arduino trabalha como um controlador de vôo que recebe entrada e envia sinais para os ESCs para obter movimentos desejados, como subir, pairar, girar e cair.
Fundamentalmente, o Arduino Quadcopter mescla hardware com software para fazer uma máquina voadora. Portanto, ele executa uma variedade de manobras, dependendo da entrada e feedback do usuário.
Diferença B/W Quadcopter vs Drone
A diferença entre um quadcopter e um drone inclui o seguinte.
|
Quadcopter |
Drone |
| Um quadcopter é um drone que se destaca pelo seu design de rotor. | O drone é um termo geral para qualquer veículo aéreo UAV ou não tripulado. |
| Ele foi projetado com quatro rotores ou hélices localizadas em uma estrutura leve. | Ele abrange uma variedade de designs, como asa fixa, vtol híbrido, multirotor, etc. |
| Este drone pode decolar verticalmente e ter a terra e flutuar no lugar. Estes são mais manobráveis em comparação com drones de asa fixa. | Este drone pode variar muito com base no design. |
| Os exemplos de quadcopter são: DJI Phantom, DJI Mavic, Drones menores de hobby, etc. | Seus exemplos são: Drones de serviço de entrega, fotografia aérea, inspeção agrícola, etc. |
| Eles têm quatro rotores .. | Os drones têm números diferentes (ou) de asa fixa. |
| Os quadcopters são normalmente mais leves e menores. | Estes são maiores e mais complexos. |
| Estes são usados em videografia, fotografia, vôo recreativo, etc. | Os drones são aplicáveis em setores industriais, comerciais e militares. |
Vantagens e desvantagens
O Vantagens quadcopter inclua o seguinte.
- Eles têm muitos benefícios devido ao seu design e recursos exclusivos
- Os quadcopters têm desempenho estável.
- Estes são versáteis e simples de usar.
- Eles têm manobrabilidade e acessibilidade.
- Eles podem pairar e alcançar voos estáveis.
O Desvantagens de Quadcopter inclua o seguinte.
- Tem tempo e velocidade limitados de voo.
- Eles têm um design complexo com várias partes vulneráveis a danos.
- Eles dependem de motores elétricos devido à necessidade de mudanças específicas do acelerador, principalmente para estabilização.
- Estes são menos eficientes em comparação com os drones de asa fixa.
- Estes podem ser afetados pelas condições climáticas.
- Considerações de segurança:
- Os quadcopters podem se tornar instáveis devido ao seu design multi-rotor, que pode potencialmente levar a falhas ou vôo irregular.
- Sua velocidade de transferência de dados é muito lenta.
Aplicações
O Aplicativos quadcopter inclua o seguinte.
- Os quadcopters são usados em diversas aplicações, que incluem abranger uma variedade de indústrias e atividades.
- Eles podem ser usados em atividades de fotografia aérea, busca e resgate, vigilância, entrega e lazer, além de acrobacias e corridas.
- Eles também podem ser usados em agricultura, inspeção de infraestrutura, monitoramento ambiental, etc.
- Os quadcopters são usados em aplicações industriais e comerciais, que incluem: fotografia aérea, videografia, agricultura de precisão, segurança, vigilância, serviços de entrega, agricultura de precisão, inspeção de infraestrutura, monitoramento ambiental, etc.
- Eles são usados em aplicativos do setor público, como segurança pública, pesquisa e resgate, aplicação da lei, gerenciamento de desastres etc.
Assim, isso é uma visão geral de um quadcopter , está funcionando e suas aplicações. It is a versatile UAV (unmanned aerial vehicle) with various applications like videography, recreational flying, aerial photography, etc. These drones play a key role in different fields like surveying, search, rescue operations, mapping, etc. So, quadcopters represent an important advancement within drone technology, which offers a blend of versatility, agility & affordability that makes them a cost-effective tool for a broad range of applications. Aqui está uma pergunta para você: O que é um UAV?