O post explica um circuito acionador de motor controlado por laser de linha simples, que funciona respondendo a uma linha de laser horizontal de precisão, gerada a partir de um dispositivo de nível de laser de linha, e ajusta automaticamente o alinhamento da ferramenta conectada ou do trabalho de trabalho com extrema perfeição e precisão.
O que é Line Laser
O equipamento de laser de linha é um substituto eletrônico de alta precisão do antigo alinhador de nível de bolha do carpinteiro.
O dispositivo de laser de linha é, na verdade, um equipamento avançado de emissão de laser que pode gerar um 360 ° linha laser horizontal iluminada de alta precisão, para fornecer uma referência de calibração para todos os trabalhos de engenharia industrial ou de construção, de forma que o resultado final do trabalho seja perfeitamente reto e alinhado sem o menor erro.
O circuito foi solicitado por um dos dedicados leitores deste blog, o Sr. Rafal.
As discussões detalhadas sobre o procedimento de trabalho do motor controlado por laser de linha podem ser aprendidas a partir dos seguintes parágrafos:
Objetivo de Design
Senhor. Rafal: Sou muito novo nisso. Fiz algumas pesquisas nas últimas semanas e não encontrei exatamente o que preciso.
Ficarei grato por qualquer ajuda. Anexo uma foto da minha ideia. Quero controlar dois motores de 12 V DC com nível de laser.
O nível do laser de linha sinalizará os receptores.

Este sinal terá que controlar a direção do motor de 12 V DC. O motor gira a haste roscada para frente e para trás para ajustar a altura da ferramenta.
Pelo que descobri, haveria vários fotodiodos conectados em paralelo, um configurado para detectar o laser acima do nível zero e outro abaixo desse nível. O nível nulo é apenas algum tipo de pausa entre os fotodiodos para evitar que o sistema seja ativado. Sensor laser sem display. Eu só dei uma foto pictórica.
Preciso de um circuito de ponte H, mas todos os encontrados por mim devem ser usados com um sistema Arduino. Se necessário, posso comprar uma ponte pronta por um preço razoável de até $ 30
Idealmente, isso funcionaria com lasers verdes e vermelhos, mas os comprimentos de onda são tão diferentes que duvido que pudesse ser feito e não funcionaria em todo o espectro de luz.
Inicialmente, gostaria de definir o nível desse feixe ligado aos motores com os botões de cima para baixo. Eu ficaria muito satisfeito se o segundo motor se nivelasse com o giroscópio durante a configuração, mas sem o Arduino isso poderia ser muito difícil.
Acho que o que estou tentando fazer é tão simples que posso escapar sem usar o Arduino. E insisto no analógico, devido às difíceis condições de um canteiro de obras e parece-me que quanto mais eletrónica, menos fiável é o dispositivo.
Ele só funcionará em ambientes fechados e a distância do laser é de no máximo 10m. O motor que encontrei no início tem um grande consumo de corrente de 200mA máx. 2,19 A, mas também um grande torque.
Alimente 18 V DC de uma bateria Makita.
Agradecemos antecipadamente por qualquer sugestão.
Saudações da Polônia
Rafal
Swag : Tenho uma confusão sobre o funcionamento dos eixos do motor. O parafuso roscado em ambos os motores empurrará a ferramenta, mas não pode puxá-la para trás? Como é que isso funciona?
É possível implementar o mesmo com um único motor?
Senhor. Rafal: As bordas retas de nivelamento inferior teriam talvez 70 cm, apenas para salas pequenas, por ex. um banheiro para que você possa entrar por uma porta.
Máquina sem propulsão, puxada à mão, apenas réguas de nivelamento. No vídeo, os dois objetos amarelos nos mastros são detectores de laser rigidamente fixados às bordas retas.
O laser está em algum lugar mais distante e produz uma linha horizontal.
Os motores seriam presos a um carrinho e o parafuso rosqueado para nivelar as bordas com detectores a laser. Deve haver dois motores para nivelar os dois lados, mas é uma imagem espelhada.
A única parte comum seria uma ponte H de dois canais, como se eu estivesse fazendo a partir de um módulo pronto e possivelmente um giroscópio, mas isso é um sonho :).
É importante que haja um botão para as revoluções dos motores esquerdo e direito.
O procedimento é este. Eu penduro o laser, por exemplo, 2 m acima do nível do chão designado. Eu meço 2 metros do feixe de laser até a borda inferior das bordas retas.
Eu regulo a altura pressionando os botões dos interruptores direita-esquerda para que seja igual a 2 metros para a borda inferior das réguas. Coloquei os detectores nos mastros de modo que o feixe de laser esteja no nível zero entre as seções do fotodiodo. E o resto vai se fazer
No anexo coloquei um desenho do funcionamento do detector.
Rafal
Projeto de Circuito

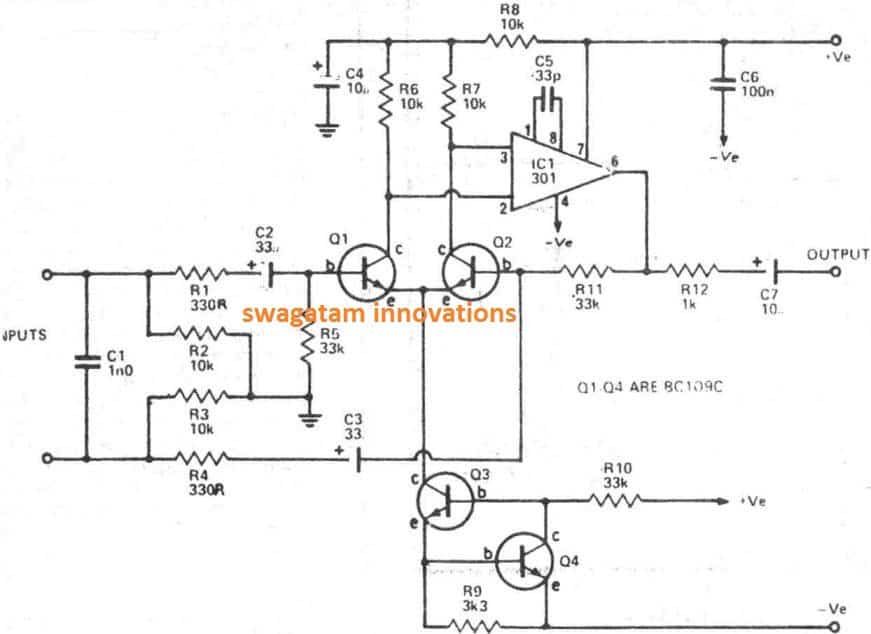
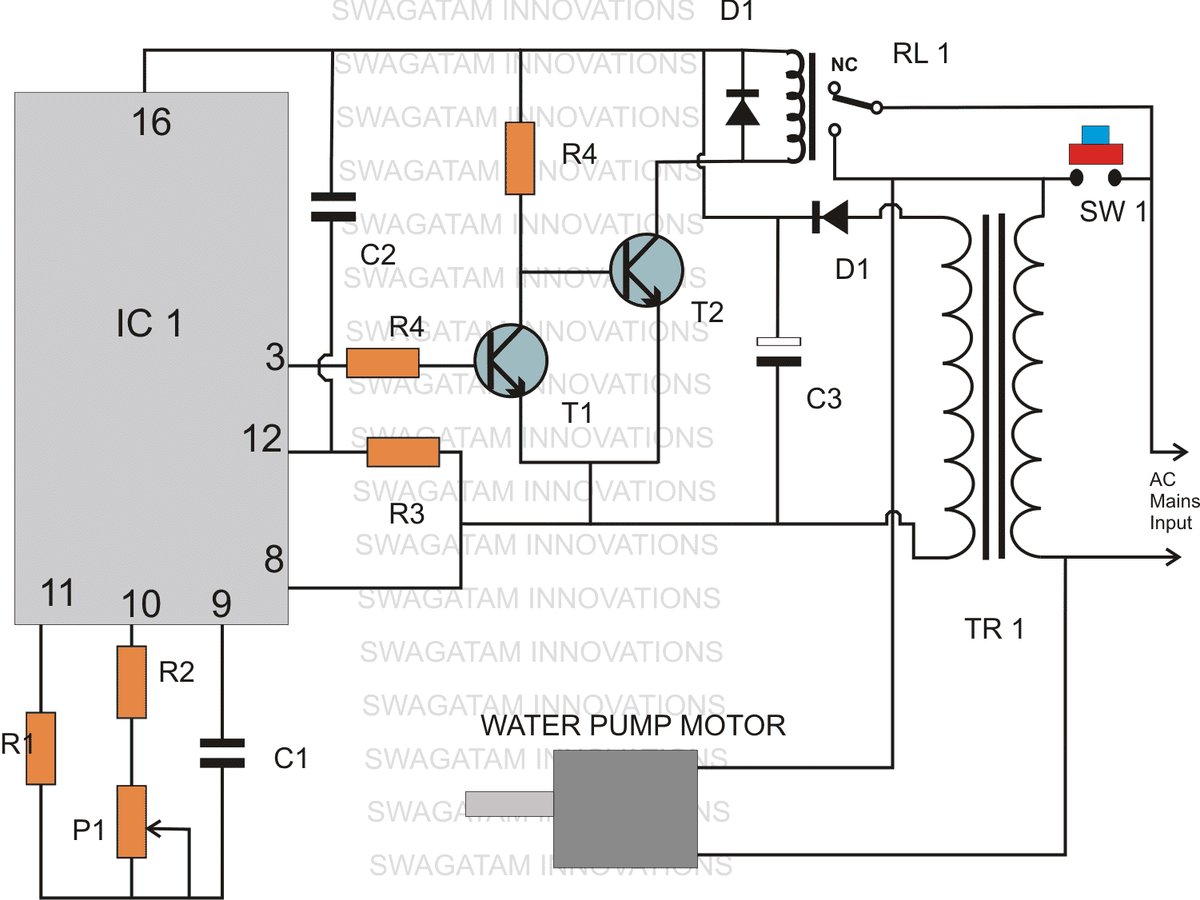
Olhando para a figura acima, dois desses estágios de circuito idênticos serão necessários para detectar e corrigir a ferramenta controlada por motor associada com relação à precisão da linearidade da linha de laser.
Os dois estágios idênticos são imagens espelhadas um do outro, conforme mostrado abaixo:

O circuito é bastante simples. Ele funciona com uma janela de comparação que garante que os motores de acionamento não estejam operacionais, desde que o par de LDRs seja exposto com o mesmo brilho da linha de laser.
Metade da tensão de alimentação é então gerada na entrada não inversora de A1 e na entrada inversora de A2.
Assim que uma deflexão na linha do laser é detectada (o que pode acontecer se a ferramenta controlada por motor não estiver alinhada diretamente), o brilho que afeta os LDRs R1 e R2 muda.
Nesta situação, a tensão de entrada para o comparador de janela se afasta da metade da tensão de alimentação. Essa situação faz com que a saída do comparador comande a rede da ponte do motor para mover o motor nas direções horário ou anti-horário.
Transistores T1. . . T4 são configurados como uma rede de ponte para permitir a comutação do motor em direções para frente e para trás dependendo da iluminação LDR ou do ângulo de desvio da linha do laser.
Diodos D1. . . D4 são posicionados para cancelar os picos de tensão gerados durante o tempo em que o motor está ativo e funcionando. A função dos potenciômetros Preset P1 e P2 é de facilitar os ajustes de alinhamento.
Eles são ajustados para garantir que o motor esteja completamente desligado e inativo, desde que o par de LDR relevante seja exposto exatamente ao mesmo brilho de luz laser.
Digamos, por exemplo, que devido ao alinhamento incorreto da ferramenta controlada por motor, a inclinação da linha de laser faz com que a luz diminua no LDR R2 do que no LDR R1. Isso fará com que a tensão no ponto A suba acima da metade da tensão de alimentação.
Nesta situação, a saída do amplificador operacional A1 torna-se alta, forçando os transistores T1 e T4 a operar. Isso, por sua vez, faz com que o motor gire na direção relevante. Esta ação desloca automaticamente a ferramenta conectada em uma linha reta até que sua precisão de alinhamento horizontal coincida com a precisão da linha do laser.
Por outro lado, se assumirmos que a ferramenta seja inclinada com a orientação oposta, de modo que a iluminação dos LDRs seja oposta à discutida acima, faz com que a tensão no ponto A caia abaixo da metade da tensão de alimentação. Esta condição faz com que o amp op de saída A2 fique alto de modo que T3 e T2 se tornem operacionais.
Isso resulta no motor agora girando na direção oposta, em uma tentativa de corrigir o alinhamento da ferramenta na direção relevante até que ela fique perfeitamente reta, coincidindo com a precisão horizontal da linha do laser.
Botão para cima / para baixo
Os botões para cima e para baixo para pré-definir inicialmente a altura do nível de bolha de ar podem ser implementados simplesmente conectando interruptores de botão de pressão em paralelo a cada um dos LDRs.
Instalação LDR
Para obter a resposta correta dos LDRs, os pares esquerdo-direito devem ser instalados dentro de um invólucro tipo tubo, de modo que sejam capazes de 'ver' apenas a iluminação do laser e não qualquer outra luz ambiente.
A ideia pode ser testemunhada na seguinte imagem:

Aqui, podemos ver que os LDRs estão posicionados muito próximos um do outro, o que garante que, quando a linha do laser está no centro exato, alguma parte de ambos os pares de LDRs sejam iluminados pela luz do laser uniformemente.
A parte frontal do gabinete do LDR pode ser coberta com uma lente difusa, de modo que a iluminação do laser possa ser difundida internamente sobre os respectivos LDRs uniformemente.
Anterior: Circuito de alarme antifurto simples para proteger itens valiosos Próximo: Circuito de teste universal BJT, JFET, MOSFET