O artigo discute um circuito de controle remoto infravermelho (IR) simples que é configurado para operar um motor DC em resposta à comutação feita a partir de um monofone remoto IR padrão, como um controle remoto de TV ou um controle remoto de DVD.
O motor conectado pode ser movido de qualquer maneira e também pode ser feito para parar.
O circuito pode ser entendido com as seguintes explicações:
Como funciona
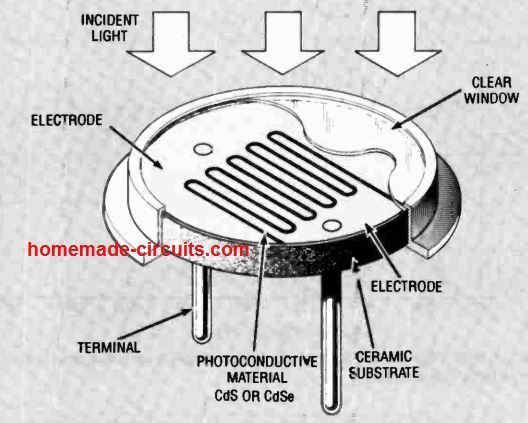
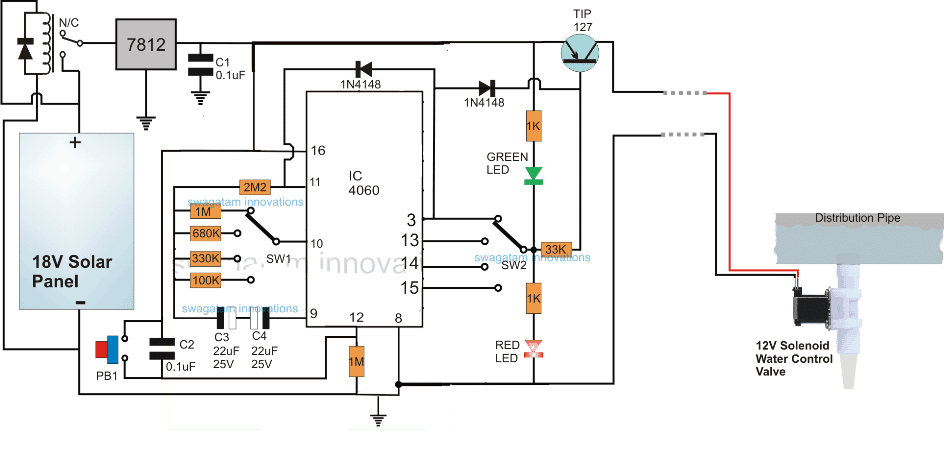
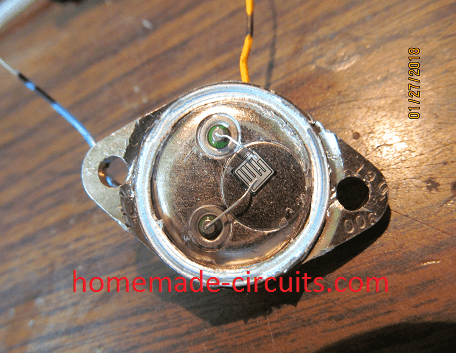
Como pode ser visto no diagrama de circuito fornecido, o sensor é qualquer módulo de sensor IR de três pinos padrão que normalmente responderia a qualquer monofone remoto de TV IR.
Quando um feixe IR (infravermelho) é focado no sensor, o pino designado como saída torna-se lógico baixo. Esta situação persiste enquanto o feixe permanecer focado nele.
O transistor T1 que é um PNP responde a este sinal lógico baixo e conduz a comutação do relé RL1 conectado.
Os contatos conectam instantaneamente o potencial positivo instantâneo no coletor do transistor ao pino # 14 do IC1, que é conectado como um circuito flip-flop.
Supondo que a sequência lógica inicial esteja no pino # 3 do IC, o acionamento acima muda a sequência para o pino # 2 do IC, tornando-o alto.
Isso liga T2 e o relé RL2 correspondente.
RL2 conduz e conecta o fio específico do motor à alimentação negativa. Como o outro terminal do motor obtém um positivo de RL3, ele começa a se mover na direção definida.
Agora suponha que o sensor receba um acionamento subsequente por meio do monofone remoto IR, o processo acima se repete e a sequência de saída muda do pino 2 para o pino 4 do IC1, que instantaneamente liga T3 enquanto desliga T2.
A ação acima reverte as conexões do relé, forçando o motor a mudar instantaneamente sua direção de rotação.
Com outro acionamento subsequente do monofone remoto, a sequência salta de volta para o pino nº 3, que não está conectado a nada e resulta no desligamento completo do motor.
A inclusão de L1, C1 garante que os circuitos não sejam influenciados por disparos espúrios do sensor.
L1 pode ser experimentado para obter o valor ideal de forma que 'aterrar' apenas sinais externos perdidos acidentais e não os sinais IV reais de um controle remoto.


Lista de peças para o circuito do motor controlado remotamente por IV (infravermelho) acima.
R1 = 100 ohms,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22uF
C5 = 1000uF / 25V
C6 = 0,22uF
L1 = 100mH choke
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Todos os relés = 12V / 400 ohms / SPDT
sensor = TSOP1738
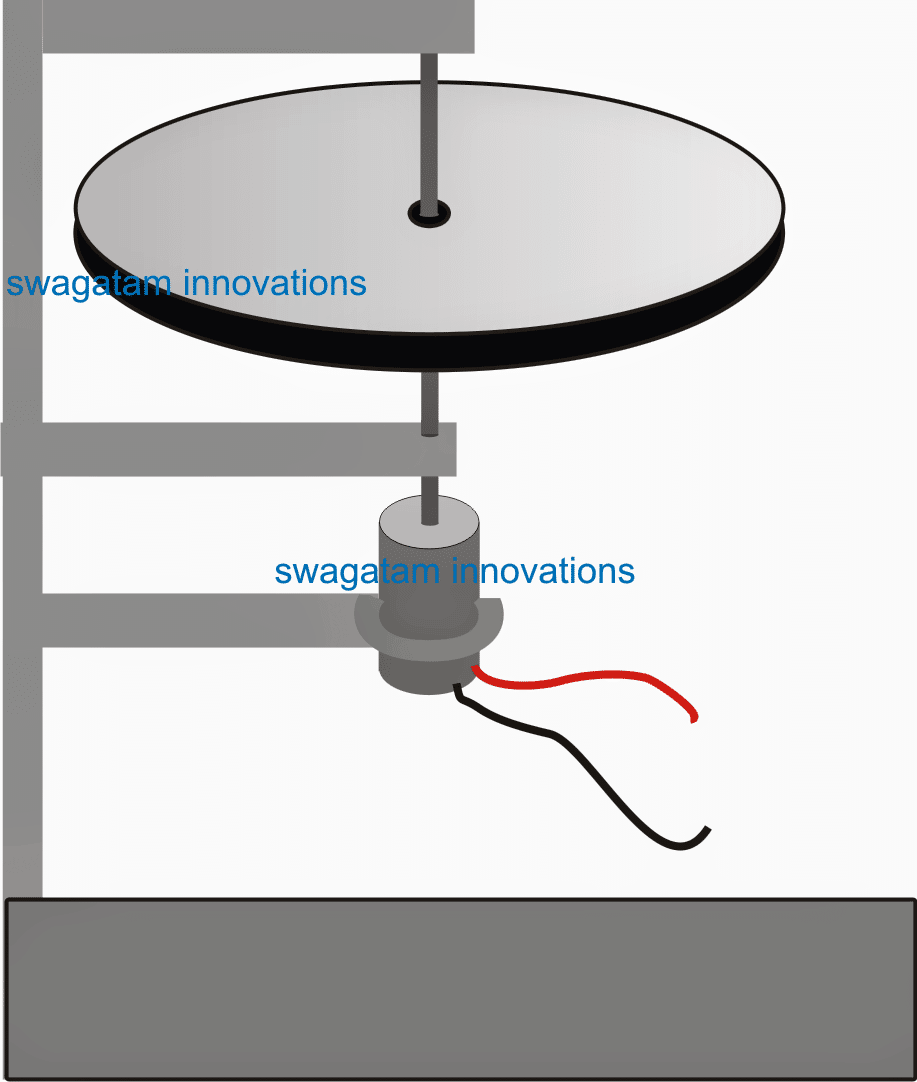
Motor = motor 12V DC
Anterior: Usando um termistor NTC como supressor de surto Próximo: Circuito de fonte de alimentação compacta de 220 V MJE13005